Linienfolger mit einem Flip-Flop
Roboter-AG (Klasse 6-8)
10 Schüler der Roboter-AG haben jeden Freitag fleißig an ihren Robotern gebaut. Nun sind diese fertig und funktionsfähig.
Der Roboter ist in der Lage einer schwarzen Linie automatisch hinterher zu fahren. Durch Sensoren unter dem Fahrgestell erkennt der Roboter helle und dunkle Bereiche auf der Fahrbahn und korrigiert dadurch seinen Fahrweg. Die Schaltung ist komplett durch analoge Bauteile aufgebaut worden. Die Schüler haben im Rahmen der AG Funktion und Aufbau von Transistoren und Sensoren kennen gelernt. Fehlersuche und Behebung gehörten ebenfalls zu den Anforderungen, die die Schüler absolviert mussten. Bis zur einwandfreien Justierung der Sensoren und dem endgültigen Funktionstest auf der Fahrbahn vergingen fast 7 Monate. Das Ergebnis kann ich sehen lassen:

Arbeitsschritte:
- Aufstecken der Schaltung auf einem Experimentiersteckbrett
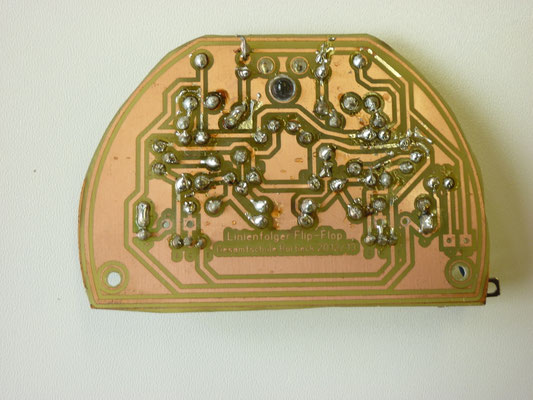
- Herstellung (Ätzen) der Platine
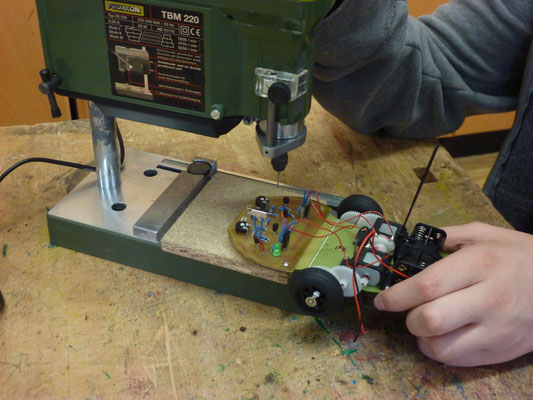
- Schleifen und Bohren der Platine
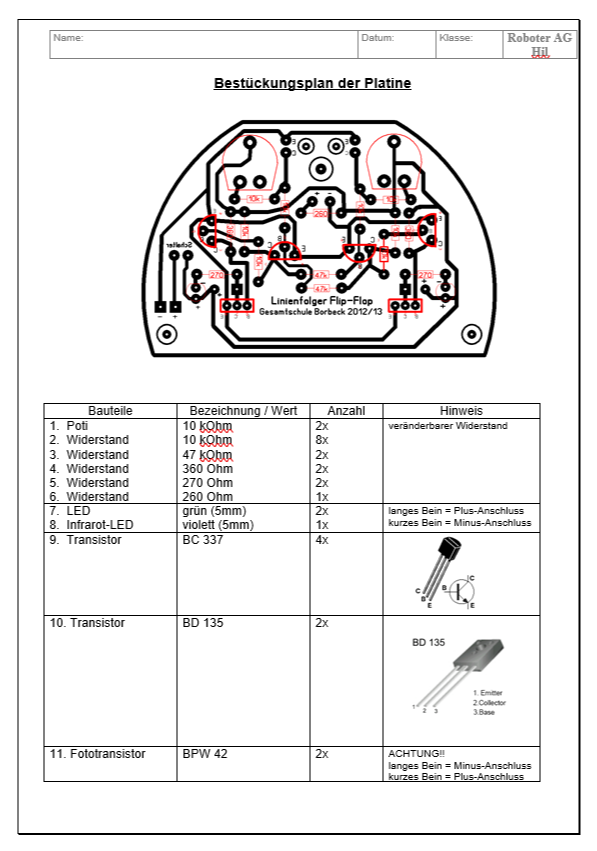
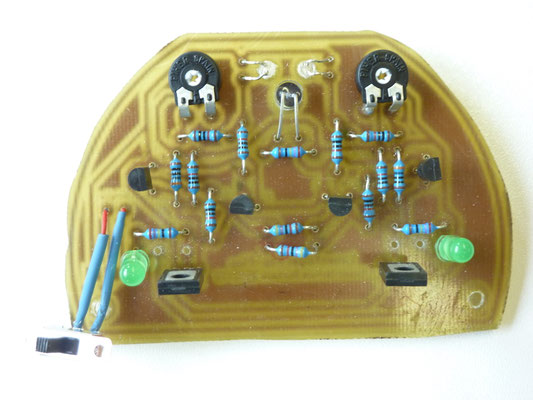
- Bestückung der Platine mit den Bauteilen
- Anlöten der Bauteile
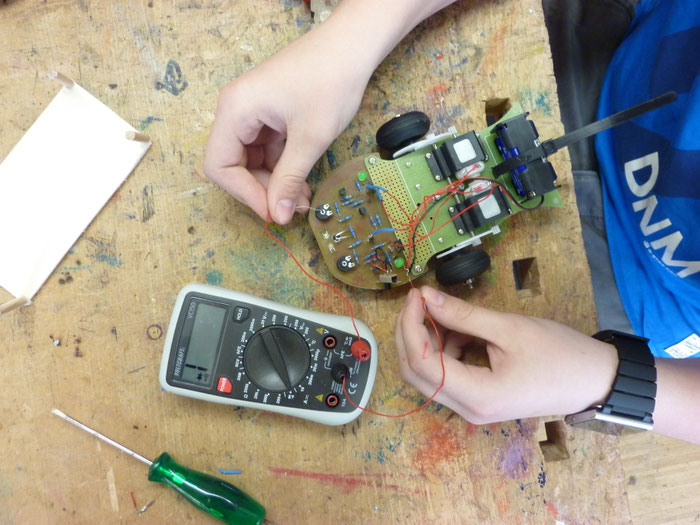
- Verkabelung und Herstellung der Anschlüsse
- Aufbau des Getriebes und des Roboterfahrgestells
- Justierung der Sensoren / Fehlerbehebung
- Funktionstest




Fehlersuche: