Linienfolger mit PWM
Aufbau des Linienfolgers:
Der Linienfolger wird in diesem Projekt mit Operationsverstärkern aufgebaut (OPV):
Der OPV eignet sich dafür besonders gut, weil dieser Verstärker bereits als fertiger IC-Baustein verfügbar ist. Lediglich die äußere Beschaltung bestimmt die Funktion des Verstärkers. Somit sind nur noch wenige Bauteile erforderlich, um die gewünschte Schaltung aufzubauen.
Für den Linienfolger wird der OPV mit der Funktion eines Komparators aufgebaut
(auch Vergleichs-Schaltung genannt).
Dazu legt man zwei Eingangsspannungen an den invertierenden (V-) und an den nichtinvertierenden (V+) Eingang an. Der Komparator vergleicht diese Spannungen miteinander und entscheidet je nach Ereignis, ob er eine positive oder negative Ausgangsspannung Ua einnimmt.
Der Wert der Ausgangsspannung steigt schlagartig bis auf den Wert der positiven bzw. negativen Betriebsspannung an.
- Wenn die Spannung am Eingang V+ größer ist als die am Eingang V- wird der Ausgang des Komparators negativ.
- Wenn die Spannung am Eingang V- größer ist als die am Eingang V+ wird der Ausgang des Komparators positiv.



Der Schaltplan
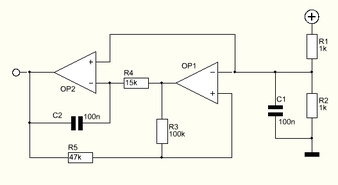
Der Aufbau des Linienfolgers ist relativ simple. Der günstige Baustein LM 324 besteht aus insgesamt vier einzelnen OPV und eignet sich für unseren Linienfolger ideal.
- Sensoren: Links im Schaltplan ist der Aufbau der Sensoren dargestellt. Verwendet wurden zwei Optokoppler der Bauart CNY 70. Dieser Baustein enthält bereits eine Infrarot-Diode und einen Fototransistor. Für die Infrarot-Diode muss lediglich noch ein Vor-widerstand eingebaut werden. Der Fototransistor erhält außerdem einen Spannungsteiler...regelbar mit einem Poti. Das Signal der Optokoppler wird jeweils an die nichtinvertierenden Eingänge der beiden Komparatoren (OPV) geleitet.
- Das Vergleichs-Signal Das Signal / die Spannung mit der jeweils das Sensoren-Signal ver-glichen werden soll, wird über den aufgebauten Signalgenerator erzeugt. Dabei handelt es sich um einen Signalgenerator der eine Dreiecks-Spannung erzeugt (Triangle-Wave). Erforderlich dazu sind zwei OPV (Bauart LM 324) und die frequenz-bestimmenden Bauteile wie Konden-satoren und Widerstände. Die Frequenz des Dreiecksignals liegt bei ca. 300 Hz.
- Der Komparator: Jeder Motor wird über einen einzelnen Komparator angesteuert. Dazu wird jeweils das Signal des linken bzw. rechten Sensors an den nicht-invertierenden Eingang (V-) des Komparators gelegt. An die beiden invertierenden Eingänge (V+) wird jeweils das Dreiecksignal vom Signal-generator angelegt. An den Ausgängen der Komparatoren entsteht nun durch den Vergleich der beiden Eingangsspannung ein pulsierendes Rechteck-Signal. Je länger die Dauer eines Rechteck-Pulses, desto länger wird der jeweilige Motor eingeschaltet. Da dies sehr schnell geschieht ist es für den Motor nicht von Nachteil, dass er ständig unterschiedlich lange an- oder ausgeschaltet wird. Die Regelung erfolgt dadurch vielmehr harmonischer und weniger "ruckelnd". Umgangssprachlich wird diese Art von Motorsteuerung auch als PWM (Pulsweitenmodulation) bezeichnet.
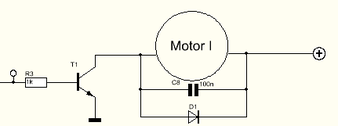
- Die Motoren : Da die Motoren im Moment des Einschaltens einen hohen Strombedarf haben, kann der Ausgang des Komparators diesen Stromfluss nicht gewährleisten. Daher werden die Motoren über Leistungstransistoren getrieben, wodurch der hohe Einschaltstrom ermöglicht werden kann.
- Freilaufdioden: Beim Ausschalten der Motoren werden durch die Induktivität der Spulen Spannungen induziert. Wird der drehende Motor abgeschaltet, würde also weiterhin die gleiche Stromstärke durch den Transistor fließen. Durch die Freilaufdiode wird verhindert, dss der induzierte Strom den Transistor zerstört.




Je länger die Pulsweite, desto länger bleibt der Motor eingeschaltet. Dadurch dreht er sich im Durchschnitt auch schneller.